机器东说念主自主完成视网膜下和血管内打针,不仅100%打针获胜,何况平均定位罪行还比医目生别减少了79.87%和54.61%?这即是中国科学院自动化商榷所多模态东说念主工智能系统寰宇重心实验室边桂彬商榷员课题组获胜研发出的一款自主显微眼科手术机器东说念主系统。
如今,该系统的临床可行性已获考据——在通盘这个词眼内空间可已毕自主的视网膜下和血管内打针,可权臣提法眼底打针的精确性、安全性和一致性,最大终端地减少医源性损害,可补助外科医师愈加专注于手术假想和监督任务。有关效劳近日发表于《科学•机器东说念主》(Science Robotics)。

视觉是东说念主类感知世界、取得外部信息最主要的渠说念,然则据世界卫生组织统计,环球已有超22亿东说念方针识受损或失明。由于眼睛软组织结构精粹、操作空间褊狭,医师在眼内手术中的手动操作濒临着弘大挑战。自主机器东说念主手术系统在眼科手术中的诳骗梗概通过愈加智能、精确的操作限制普及手术安全性,缩小外科医师学习弧线,为多种眼科疾病的诊疗提供新的可能,惠及更多患者。
商榷团队研发的自主显微眼科手术机器东说念主系统,翻新性地构建了从术中三维空间感知、跨圭表精粹目位到轨迹精确限制的核默算法模块。率先,在三维空间感知方面,团队提议了一种多视角空间交融技艺,有用克服多模态眼内成像中的成像异质性和动态空间失准问题,澳门威斯人app构建了术中动态更新的全局三维舆图,已毕了对眼内区域的全面感知。其次,在精粹目位方面,商榷东说念主员提议了一种基于准则加权的多传感器数据交融技艺,科罚了检测限制、罪行幅度和采样频率的各别,使机器东说念主手术器械顶端在眼内区域已毕精确的宏不雅-微不雅定位。再者,在轨迹限制方面,他们提议多拘谨方针优化技艺,对机器东说念主末端实验器的轨迹进行精确经营,并连合东说念主监督下的力-位置-影像搀和限制确保了手术的安全性。
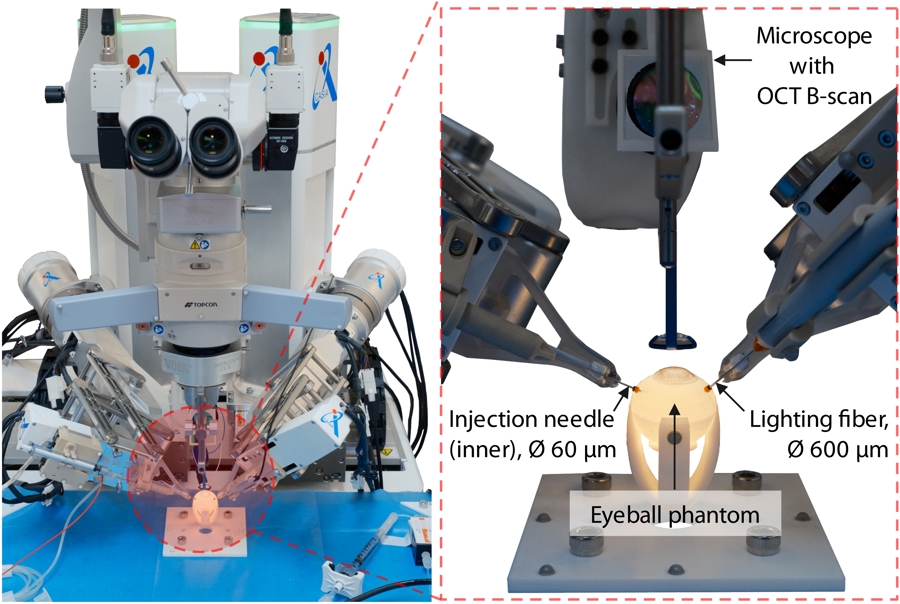 显微眼科机器东说念主进行自主视网膜手术默示
显微眼科机器东说念主进行自主视网膜手术默示
在眼球假体、离体猪眼球及活体动物眼球的视网膜下打针与血管打针实验考据中,该系统均已毕了100%的打针获胜率。与医外行脱手术及医师主从操作机器东说念主手术比拟较,平均定位罪行划分减少了79.87%和54.61%,说明出更高的安全性和精确性。
该商榷效劳为眼内手术的自主化开拓了全新的本清爽径,不仅考据了自主机器东说念主在显微手术中诳骗的可行性,更有望鼓吹眼科手术诊疗的智能化、精确化升级,尤其在良友医疗和顶点环境等复杂场景中展现出宽阔的诳骗后劲。
 显微眼科机器东说念主主要商榷东说念主员:付攀博士生、叶强助理商榷员、边桂彬商榷员、翟宇鹏博士生、李桢副商榷员、邓雅文博士生(从左至右)
显微眼科机器东说念主主要商榷东说念主员:付攀博士生、叶强助理商榷员、边桂彬商榷员、翟宇鹏博士生、李桢副商榷员、邓雅文博士生(从左至右)
中国科学院自动化商榷所商榷员边桂彬为本文独一通信作家,博士生邓雅文为共同第一作家。商榷责任得到国度当然科学基金、国度重心研发策画、北京市当然科学基金和中国科学院后生翻新促进会优秀会员等基金支柱。
图2
 备案号:
备案号: